
Victoria Dean
Hello! I'm a teaching professor in the Department of Computer Science at Princeton University. My research interests are at the intersection of machine learning and robotics, investigating generalization, benchmarking, and democratization. I teach across introductory computer science, machine learning, and ethics and enjoy implementing real-world projects in my courses. I'm passionate about teaching and mentoring undergraduate students, with an emphasis on improving diversity, equity, and inclusion.
Prior to joining Princeton, I was an Assistant Professor of Computer Science at Olin College of Engineering. I did my PhD at CMU's Robotics Institute, advised by Abhinav Gupta and supported by the NSF GRFP and Siebel Scholars. I got my BS in Computer Science from MIT. I've also spent time at DeepMind, Waymo, Deep Genomics, Counsyl, Google, and Coursera.
I am always looking for students, especially those from underrepresented groups, to collaborate with. If you're interested, please email me!
News
At SIGCSE TS 2024, I'm a panelist on Interviewing the Teaching Faculty Hiring Process and organizing a BOF for Primarily Undergraduate Institution Faculty.
In Fall 2023, I had a blast co-teaching a new Olin course, AI and Society.
Our paper, Train Offline, Test Online: A Real Robot Learning Benchmark, was accepted to ICRA 2023 and received the Best Paper Award at NeurIPS Broadening Collaborations in Machine Learning Workshop.
I completed the Future Faculty Program via the Eberly Center for Teaching Excellence & Educational Innovation.
Teaching
Ethics and Robotics (16-735)
Carnegie Mellon UniversityInstructor of Record, Spring 2021 [SIGCSE paper]
Deep Reinforcement Learning for Robotics (16-881)
Carnegie Mellon UniversityTeaching Assistant, Spring 2020

Introduction to Deep Learning (6.S191)
Massachusetts Institute of TechnologyLecturer and Co-Chair, January 2017 [video]

MIT Global Teaching Labs: Python and Machine Learning
Istituto Tecnico Industriale Statale Tullio Buzzi di PratoInstructor, January 2016


Code for Good (6.S187)
Massachusetts Institute of TechnologyInstructor of Record and Founder, 2014 - 2017
Introduction to Electrical Engineering and Computer Science (6.01)
Massachusetts Institute of TechnologyStudent Lab Assistant, Spring 2014

Research
Train Offline, Test Online: A Real Robot Learning Benchmark
Gaoyue Zhou*, Victoria Dean*, Mohan Kumar Srirama, Aravind Rajeswaran, Jyothish Pari,
Kyle Hatch, Aryan Jain, Tianhe Yu, Pieter Abbeel, Lerrel Pinto, Chelsea Finn, Abhinav Gupta
Train Offline, Test Online (TOTO) provides remote users with access to shared robots for evaluating methods on common tasks and an open-source dataset of these tasks for offline training. We present results on TOTO comparing five pretrained visual representations and four offline policy learning baselines, remotely contributed by five institutions. We release the benchmark for additional submissions from any user, enabling easy, direct comparison to several methods without the need to obtain hardware or collect data.
CMU, Meta AI, NYU, Stanford, UC Berkeley | ICRA 2023. [website, blue sky paper]
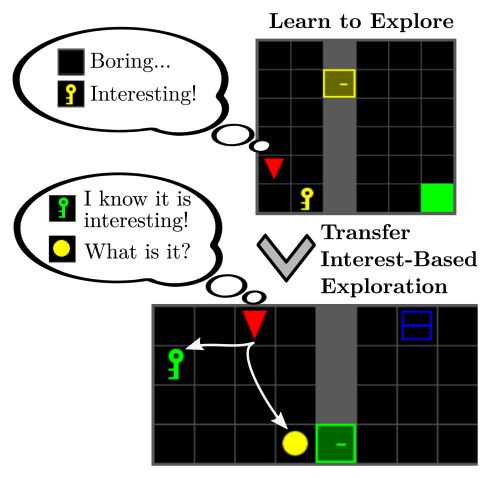
Interesting Object, Curious Agent: Learning Task-Agnostic Exploration
Simone Parisi*, Victoria Dean*, Deepak Pathak, Abhinav Gupta
We propose a paradigm change in the formulation and evaluation of task-agnostic exploration. In this setup, the agent first learns to explore across many environments without any extrinsic goal in a task-agnostic manner. Later on, the agent effectively transfers the learned exploration policy to better explore new environments when solving tasks. In this context, we evaluate several baseline exploration strategies and present a simple yet effective approach to learning task-agnostic exploration policies. CMU and FAIR | NeurIPS 2021. [paper, code]
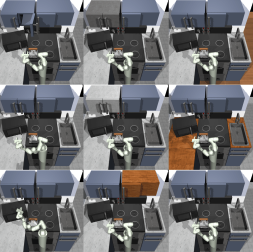
KitchenShift: Evaluating Zero-Shot Generalization of Imitation-Based Policy Learning Under Domain Shifts
Eliot Xing, Abhinav Gupta, Sam Powers*, Victoria Dean*
We propose a testing protocol for evaluating the generalization of policy learning methods. We implement and evaluate KitchenShift, an instance of our testing protocol that applies domain shifts to a realistic kitchen environment. Using KitchenShift, we evaluate imitation and representation learning methods used in current policy learning approaches and find that they are not robust to minor changes in the environment. [paper]
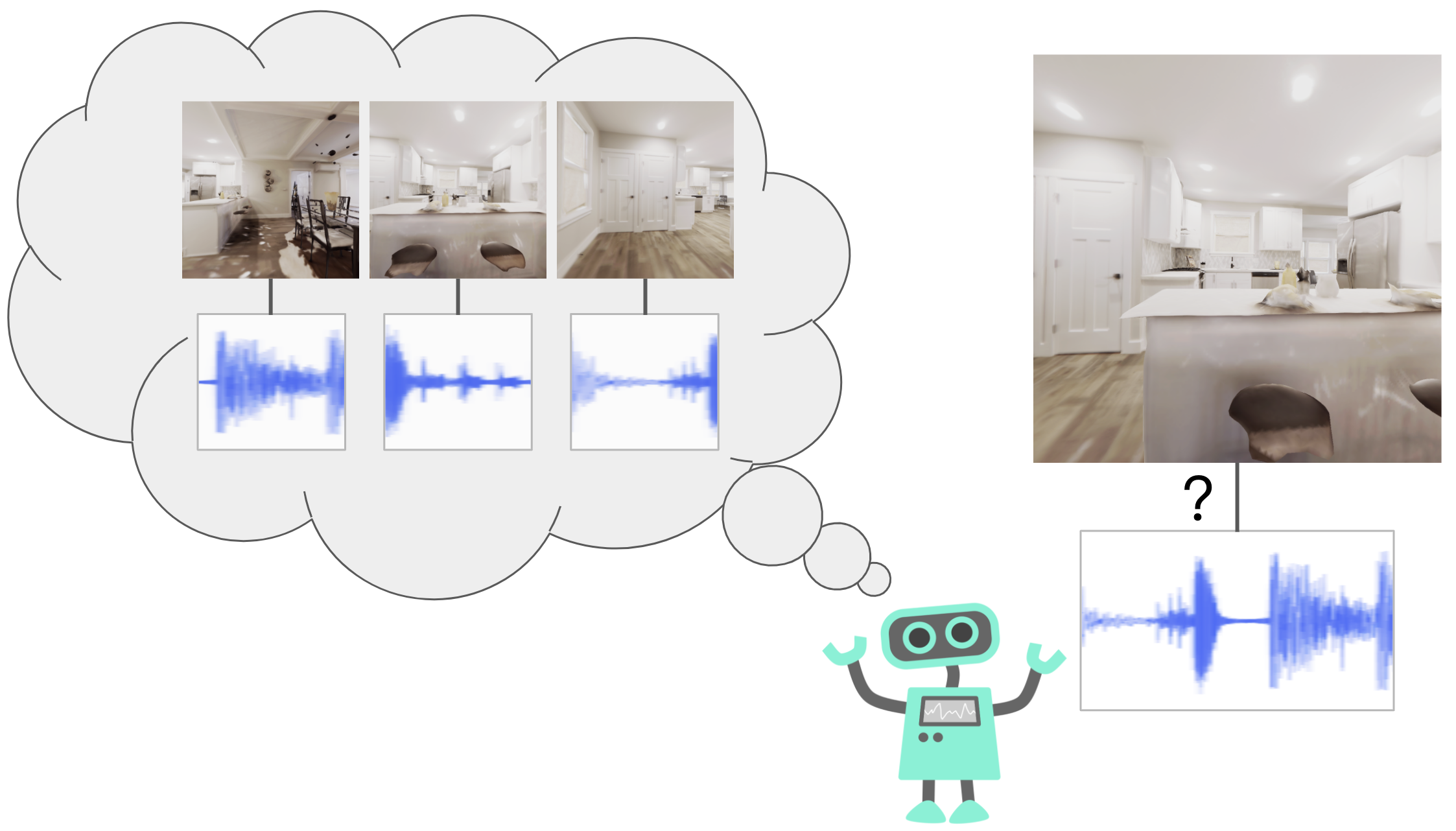
See, Hear, Explore: Curiosity via Audio-Visual Association
Victoria Dean, Shubham Tulsiani, Abhinav Gupta
We introduce See, Hear, Explore (SHE): a new curiosity formulation using multimodal self-supervision. SHE rewards actions that generate novel associations between different sensory modalities (pixels and sounds). Our results on Atari and AI Habitat show that SHE allows for more exploration, is more sample-efficient, and is more robust to noise compared to existing curiosity baselines on these environments. CMU and FAIR | NeurIPS 2020. [paper, website, video]

CaRL: Combining Imitation Learning with Reinforcement Learning
Used reinforcement learning to improve upon imitation learned policies for trajectory generation, with the goal of both learning from observed behavior and generalizing beyond it. Built upon work presented in this paper. Waymo 2018.

Onboard Text Detection
Developed and deployed an onboard text detection system that allows cars to recognize a set of important words to disambiguate a number of situations. Used an accurate but expensive Google OCR system to train a low-latency onboard model. Waymo 2017. [patent]
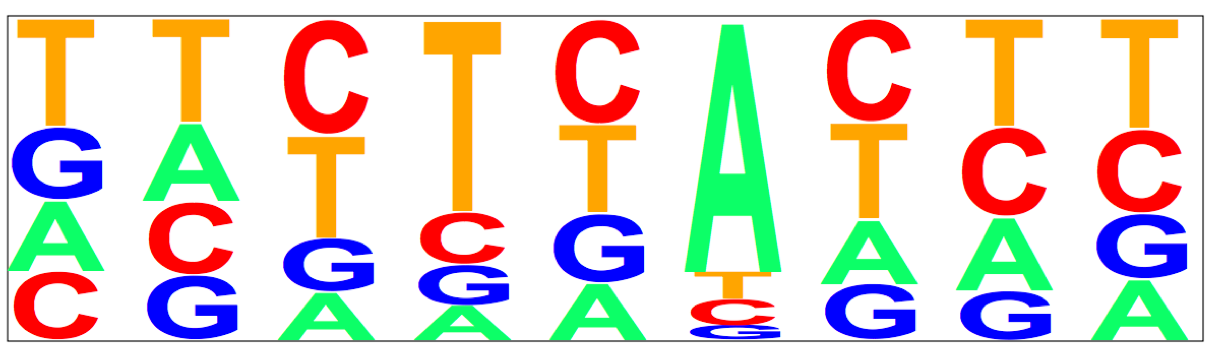
Deep Learning for Branch Point Selection in RNA Splicing
Built BRANCHR, a state-of-the-art model for predicting branch point selection, a crucial step in RNA splicing. Deep Genomics | WiML and MLCB (oral) at NeurIPS 2016. [paper]
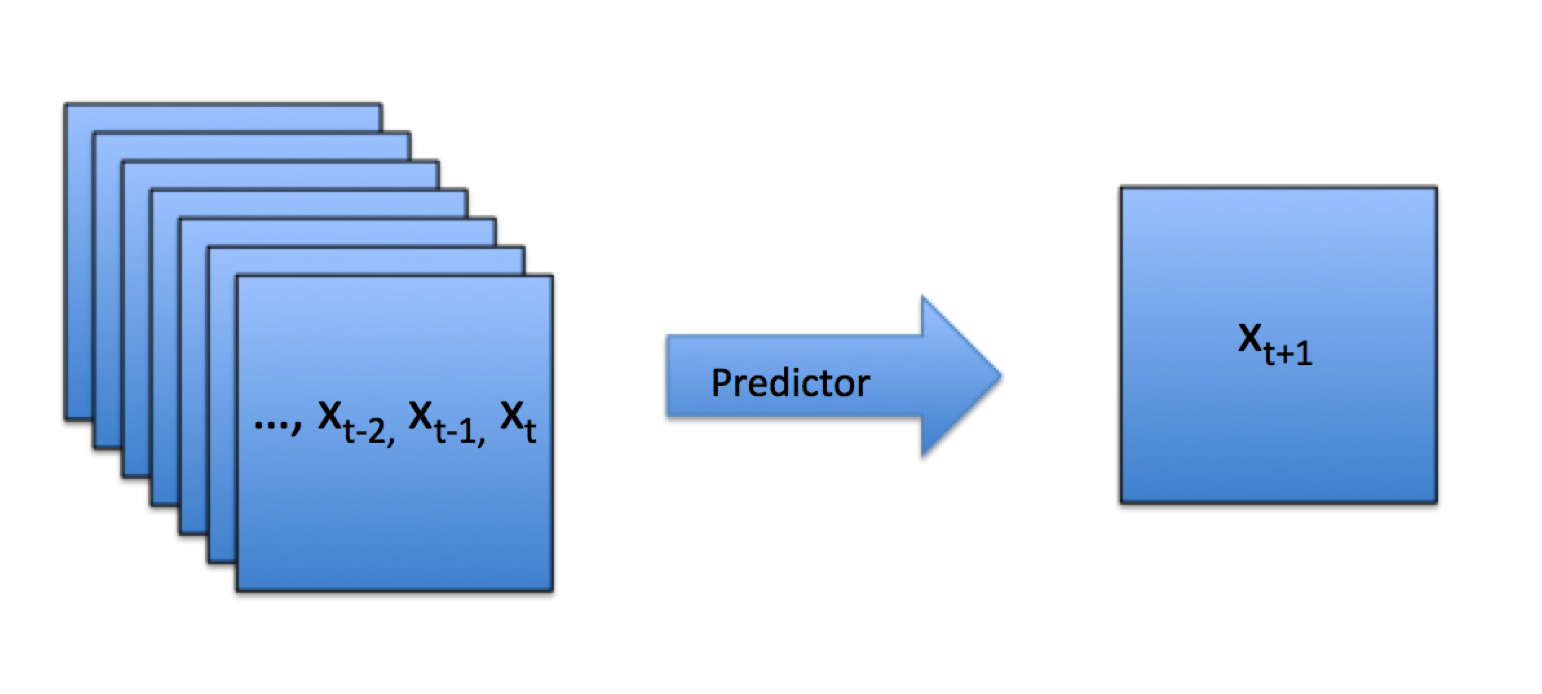
Predicting the Future: Generative Models for Video
Experimented with CNN models to predict a frame given past frames. Presented poster at SuperUROP poster session. MIT Computer Vision group | EECSCon 2016. [poster]
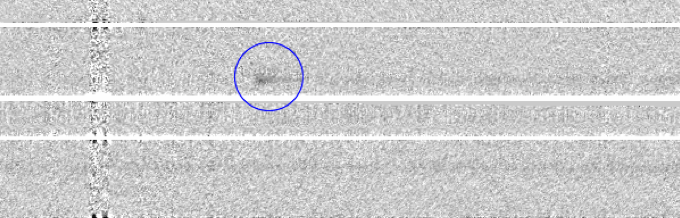
Automated Search for Lyman Alpha Emitters
Developed pattern matching software to search spectra for distant galaxies. Presented poster at 2013 American Astronomical Society meeting. Intel Science Talent Search semifinalist. UC Santa Cruz | American Astronomical Society Meeting 2012 and 2013. [paper, poster 1, poster 2]
Other
I've organized a few workshops: L-DOD at ICRA '23, Robot Learning in the Cloud and L-DOD at RSS '22, DiffCVGP at NeurIPS '20.With the Dean's PhD Advisory Committee, I co-wrote a public letter, Towards Anti-Racist Change in the School of Computer Science, which amassed more than 600 signatures in 2020.
I've released my NSF GRFP application statements for future applicants [personal, research].
Outside of research, I enjoy knitting, reading, rowing, and experimental baking.
{kind=link}